
8 Velocity
We have learned how to use vectors to describe the position and displacement of an object. We can now turn to describing how objects move. The movement of an object is described by its velocity. The velocity tells us:
- how fast an object is moving.
- in which direction is the object moving.
The fact that velocity is a vector is pretty important: traveling at 60 mph due East is not at all the same thing as traveling 60 mph due North! For this reason, in physics we make a distinction between the words velocity and speed.
Velocity is a vector (how fast you’re going, and in which direction).
Speed is a scalar (how fast you’re going, regardless of direction).
Thus, 60 mph due North is a velocity, but 60 mph is a speed.
Exercise 8.1: What is Constant Velocity?
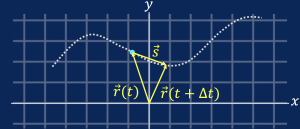
Ok- so velocity is a vector, and we care both about its magnitude and direction. But what exactly is velocity in math terms? To figure it out, let’s think about an object moving in space. At any given time, there is a vector  that starts at the origin and points to the object. We call this the position vector. As the object moves, it traces out a curve, so you get something that looks like this:
that starts at the origin and points to the object. We call this the position vector. As the object moves, it traces out a curve, so you get something that looks like this:
Consider the particle at time  and position . Some small amount of time
and position . Some small amount of time  later, the particle’s position is
later, the particle’s position is  . From our every day experience, we know
. From our every day experience, we know
(distance travelled) = (speed) (time).
(time).
Based on the above expression, what are the units of velocity?
We can use this intuition of (distance travelled) = (speed)(time) to define the velocity vector. Let’s see how this comes about.
Exercise 8.2: The Definition of Velocity
Consider a particle moving along a trajectory as shown below, and let’s draw the position vectors and . We will also draw a vector  going from to . This vector is telling us how the particle moved.
going from to . This vector is telling us how the particle moved.
A. Find the relation between the vectors , , and .
B. Use the idea that (distance travelled) = (velocity)(time travelled) to relate the vector and the velocity vector  of the particle.
of the particle.
C. Plug in your result from part B into the relation you found in part A to find how the velocity vector is related to and .
The equation you just derived, i.e.  , is the best way to think about velocity. In particular, notice that in English, this equation can be rewritten as:
, is the best way to think about velocity. In particular, notice that in English, this equation can be rewritten as:
(Final position of a particle) = (initial position) + (displacement)
where (displacement) =  .
.
In the next two problems, we use this new understanding to learn an interesting feature about which way the velocity of an object points.
Exercise 8.3: Which Way Does Velocity Point?
Consider the drawing we had above, where a particle with position traced out a curve. We can imagine making the time interval smaller and smaller.
Exercise 8.4: Which Way Does Velocity Point?
A car is driving around in a circle at constant speed in a counter-clockwise fashion. The plot below shows a variety of possible velocity vectors for the car as it reaches the blue point marked on the circle. The vectors are labelled A through H.
Click on the label of the vector that corresponds to the velocity vector of the car as it reaches the blue point.
You will find in most textbooks velocity is defined in terms of derivatives. I think this is backwards: Newton and Leibniz invented calculus because they were trying to understand how objects move. That is, rather than using derivatives to define velocities, the concept of a derivative “pops out” when thinking about velocities. Let’s see how this works.
We start with our fundamental equation for describing velocity,
 .
.
The above equation is only valid in the limit that  . So- let’s solve for , and take the limit . We arrive at
. So- let’s solve for , and take the limit . We arrive at

You may recognize the limit on the right hand side as the definition of the derivative. That is,
Velocity is the derivative of position.
In equation form, we write this sentence as  , where
, where  represents the derivative with respect to time.
represents the derivative with respect to time.
Calculus in this book
We just learned that velocity is the derivative of position. If you are not too comfortable with calculus, let me pull up a quote from John von Newmann, one of the world’s most famous mathematicians from the 20th century.
“Young man, in mathematics you don’t understand things, you get used to them.”
This book is very much built around this sentiment: the more you use calculus, the more familiar it will become, and the easier it will get: noone “just gets it.” With that in mind, I’m going to ask you to remember three rules about derivatives.
- Derivatives are linear operations. That is, you can “slide” derivatives past “+” signs. If
 and
and  are functions of , then:
are functions of , then:
![\frac{d}{dt}\left[ f+g \right] = \frac{df}{dt}+\frac{dg}{dt}](https://opentextbooks.library.arizona.edu/app/uploads/quicklatex/quicklatex.com-b85a739c560cae7ffea3c33a16b44b35_l3.png "Rendered by QuickLaTeX.com") .
.
- Constants “come out of the derivative.” So, if is a function of , and
 is a constant, then
is a constant, then
![\frac{d}{dt}\left[ af \right] = a\frac{df}{dt}](https://opentextbooks.library.arizona.edu/app/uploads/quicklatex/quicklatex.com-5981c91201d4652006f180328f056faf_l3.png "Rendered by QuickLaTeX.com") .
.
- The derivative of a power of is calculated as follows:
![\frac{d}{dt} \left[ t^n \right] = n t^{n-1}](https://opentextbooks.library.arizona.edu/app/uploads/quicklatex/quicklatex.com-b40b0458927594d74e55189d8d8ef416_l3.png "Rendered by QuickLaTeX.com") .
.
Where do these rules come from? Well- one has to go back to the definition of a derivative, and check that these rules “work” (i.e. when you apply the definition, this is what you get). This is basically what you do during a calculus course (see homework problem 1 below). For the purposes of this book, however, all we will care about is being able to proficiently use the rules of calculus.
Exercise 8.5: Velocity is the Derivative of Position
Consider a vector  . Use the laws for computing derivatives to find the velocity vector in terms of the derivatives of the functions
. Use the laws for computing derivatives to find the velocity vector in terms of the derivatives of the functions  and
and  .
.
Exercise 8.6: Calculating Velocities
The position of a particle as a function of time is described by the position vector
![\vec r(t) = \left[ y_0 - \frac{1}{2}a t^2 \right]\hat y](https://opentextbooks.library.arizona.edu/app/uploads/quicklatex/quicklatex.com-60a7266a4d27aaeae3586be380b145fa_l3.png "Rendered by QuickLaTeX.com")
where  and are all constants larger than zero.
and are all constants larger than zero.
Compute the velocity vector. Double check your solution to make sure it is correct!
In addition to being able to compute the velocity vector, you ought to be able to understand what it is that you just found in terms of sentences in English. Try it now.
Key Takeaways
Velocity describes how an object moves. In equation form:
.
In addition to the above equation, the key things to remember are:
Extra Problems (optional):
Optional Problem (Calculus Practice): Use the definition of the derivative, i.e.

to show that:
- the derivative of a constant function is zero.
- the derivative of the function
 is one.
is one. - the derivative of the function
 is
is  .
. - the derivative of the function
 is
is  .
.
At this point, you can see the pattern that leads to the derivative of  being
being  .
.
Optional: If you feel so inclined, you can attempt proving that  for an arbitrary
for an arbitrary  . To do so, you may need to use the binomial theorem:
. To do so, you may need to use the binomial theorem:
 .
.